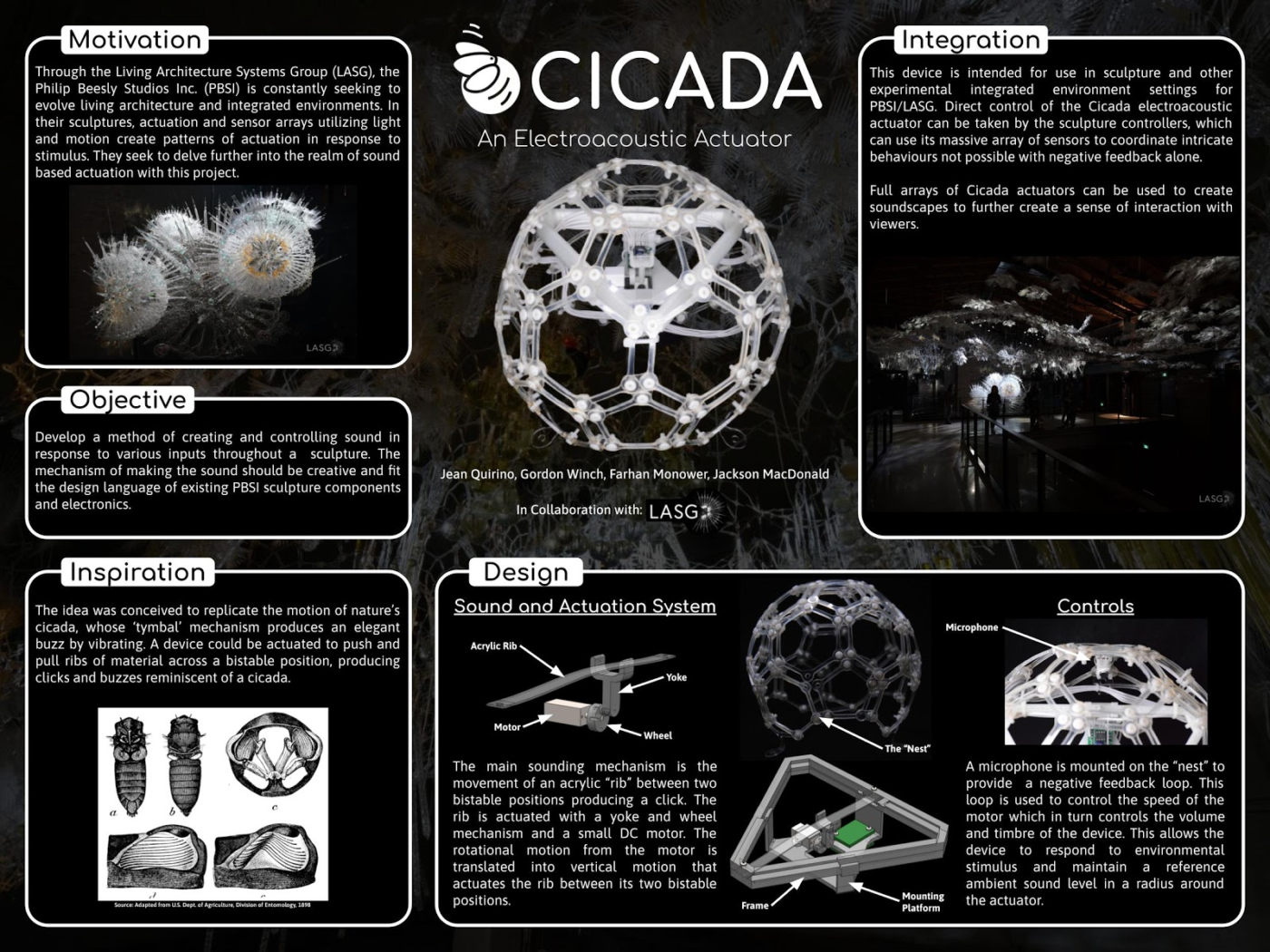
Cicada Electroacoustic Actuator
University of Waterloo Capstone Project
Waterloo, CAN 2020
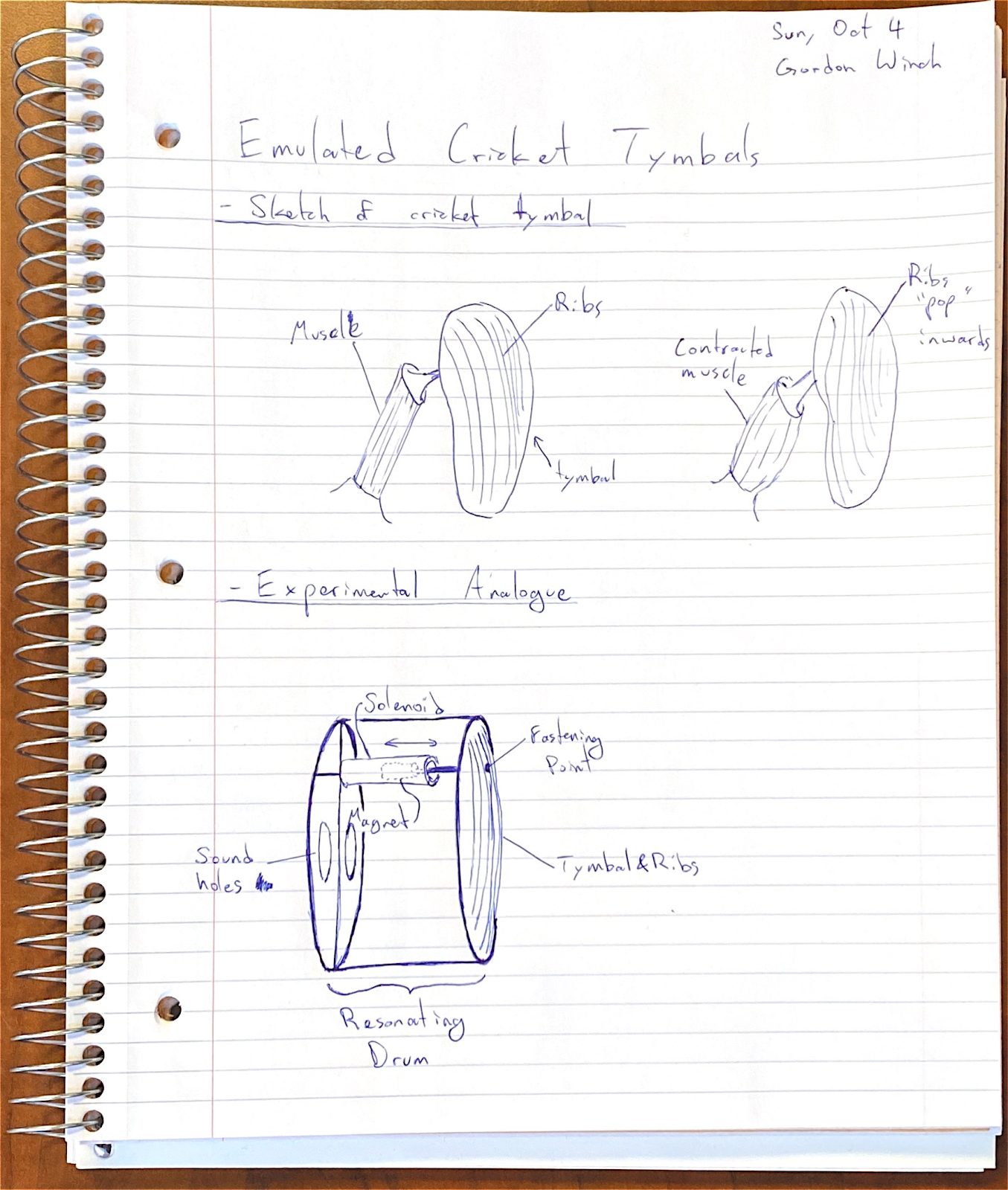
In this project, the Living Architecture Systems Group has partnered with a team of fourth-year mechatronics engineers from the University of Waterloo to produce an acoustic actuating device that is compatible with LASG testbed installations. The device is modelled after the clicking tymbal structure of a cicada. A tymbal is the flexible membrane on the cicada’s body, made up of bistable ribs that “click” from one side to another. Just as a cicada oscillates the ribs to produce its characteristic buzz, this device actuates a bistable metal rib to produce a clicking sound. In a production environment, several acoustic actuators would be arrayed across a sculpture to create a soundscape of clicks reminiscent of a warm summer’s night.
Progress Logs
April 9, 2021
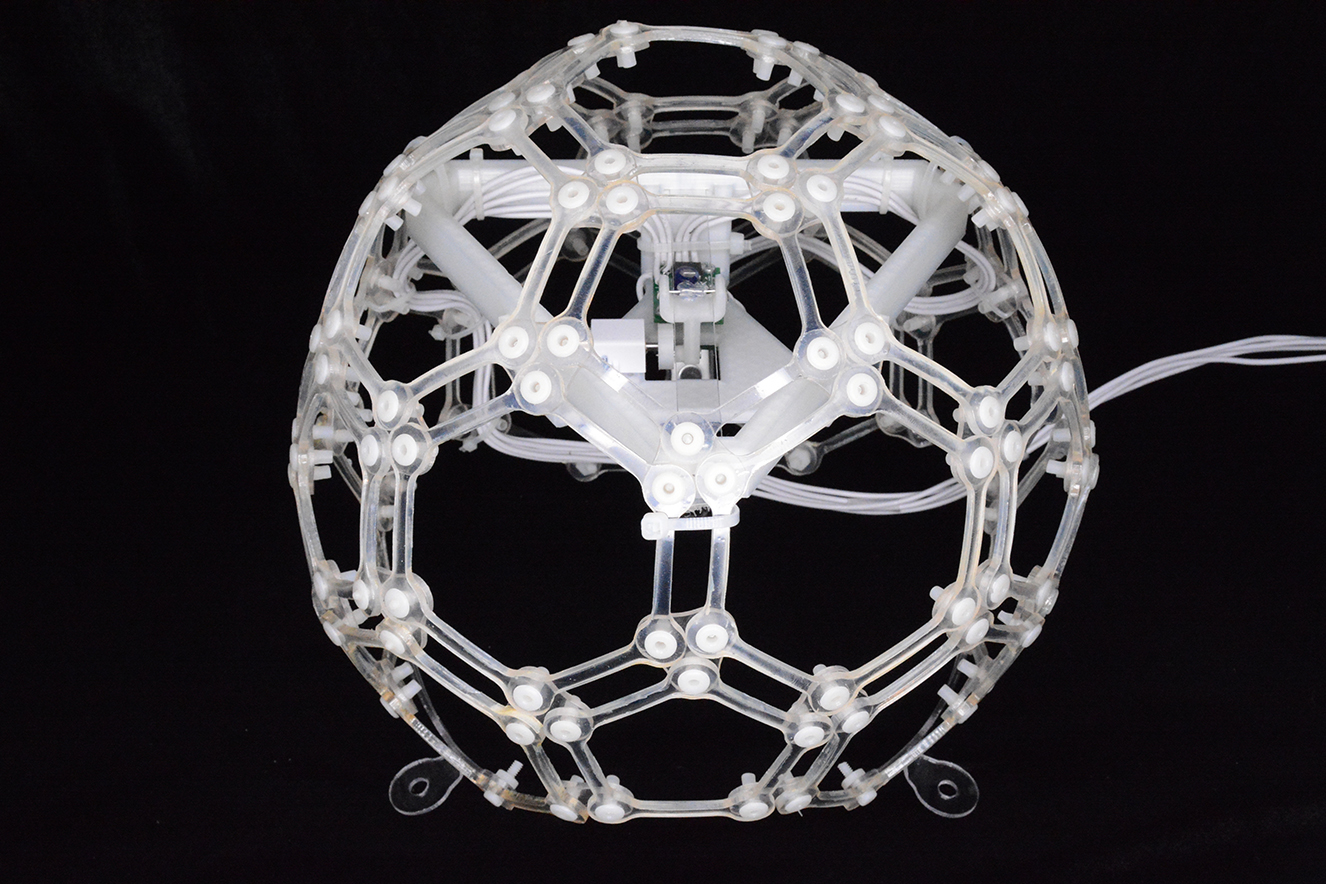
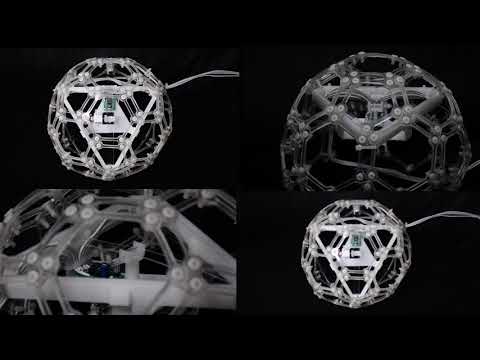
The Cicada has been completed. After a redesign of the frame and the mounting into a PBSI Nest, the Cicada reached its final iteration in time for the University of Waterloo 2021 Mechatronics Engineering Design Symposium. The project can be found on the Waterloo website here. The poster presented at the Waterloo Mechatronics 2021 Capstone Symposium can be seen below.
Considerations were taken to wrap the Nest in a resonating chamber, but the device was loud enough and the ideal mode of construction, plastic vacuum-molding at Waterloo’s facilities, was unavailable. Ideally, one half of the Nest would have been wrapped in plastic or fitted with custom hexagonal and pentagonal plates to better direct the sound. However, given that the only material the team had reasonable access to was cling wrap, it was decided that the production video would go without a resonating chamber.
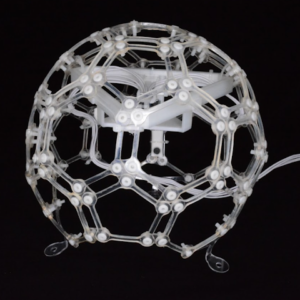
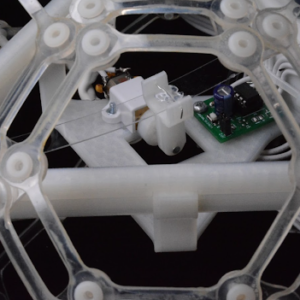
![Device with a resonating chamber fashioned from cling wrap. This addition was unattractive and made little difference to the sound quality, and was thus removed. [credit: Farhan Monower and Gordon Winch]](https://livingarchitecturesystems.com/wp-content/uploads/image_2021-04-09_181323.png)
In review, the Cicada meets all of the designated design criteria, including the ability to run in passthrough or feedback-control mode. It is now ready to be integrated with sculpture and workshop installations. The end product sounds remarkably similar to a real cicada, as can be seen in the project marketing video below.
There were a number of challenges that were encountered during the course of this project, particularly due to the COVID-19 pandemic. In-person gathering was prohibited, which meant that most prototyping happened in solo work sessions. Our mechanical designer was located in Hamilton and the assembly happened in Toronto, so to this day she’s been unable to see or touch any of the 3D prints she designed.
The closure of the university also meant that the team lost access to all of the technical labs and facilities that would have been used during the construction and testing of the project. However, in this case our team was fortunate because we were able to make use of the 3D printing capabilities of the PBSI studio. With the team scattered across southern Ontario, many hours were spent ferrying printed parts and bits of electronics from one place to another.
Overall, the team adapted well to the pandemic. We were able to collaborate successfully with one another and with the folks at the studio, and produced a device which met and exceeded our expectations. When this is all over, we hope to gather in person so that all of our team members can hold the device in their hands and hear it running with their own ears.
March 22, 2021
The initial prototyping work for the cicada has been finished. Initially using a breadboard with a simple PWM controller and a random noise generator, we tested later on the actual device with a microphone set up on the test rig to tune our feedback control mode. The main challenge was creating a feedback control system to modulate the motor voltage. However, using a PI controller we managed to obtain a somewhat stable control scheme. This control scheme holds the device at a level which produces the desired volume of ambient sound. It also responds to changes in the environment, such that a loud disturbance will cause the device to become quieter.
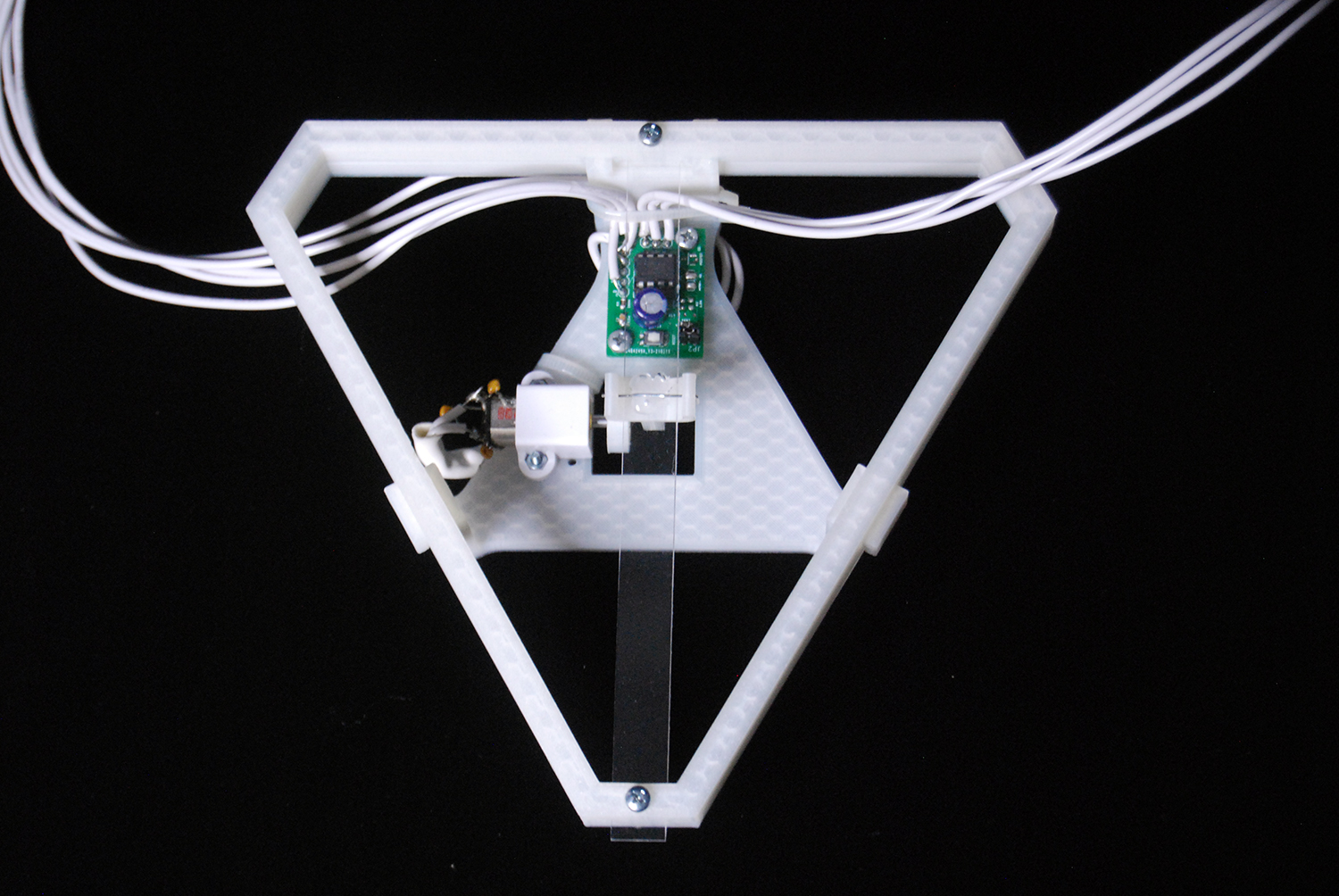
Additionally, the mechanical and electrical constraints of the project have now mostly been fulfilled. The circuit is fully functional, with a mode-setting digital input line and a low-pass filtered analog input line. Elements we are waiting on include the shipping of a set of geared motors which should be even quieter than the brushed motor we are currently using, and the printing and shipping of our custom PCB. Below are some videos of the device meeting various design constraints.

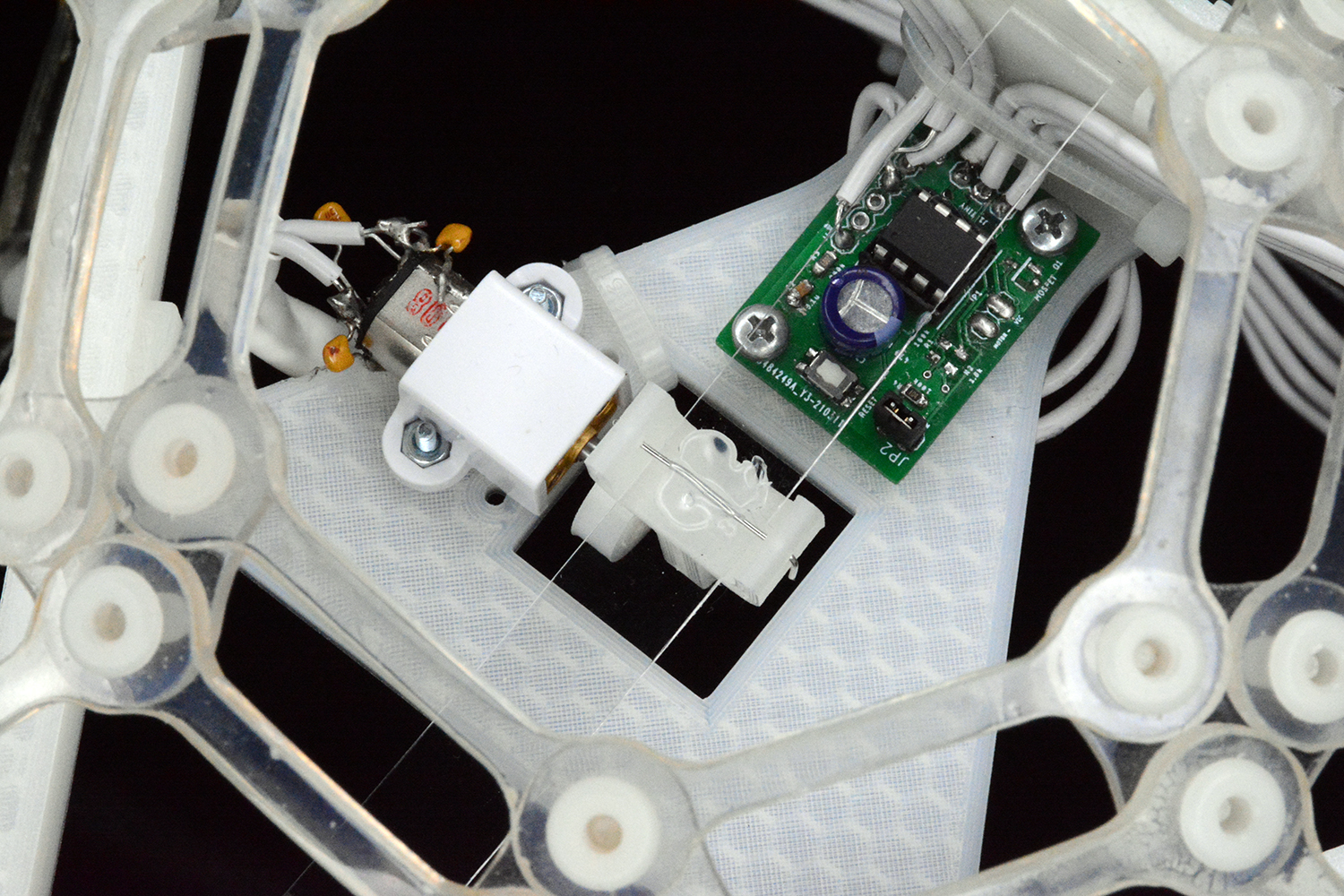
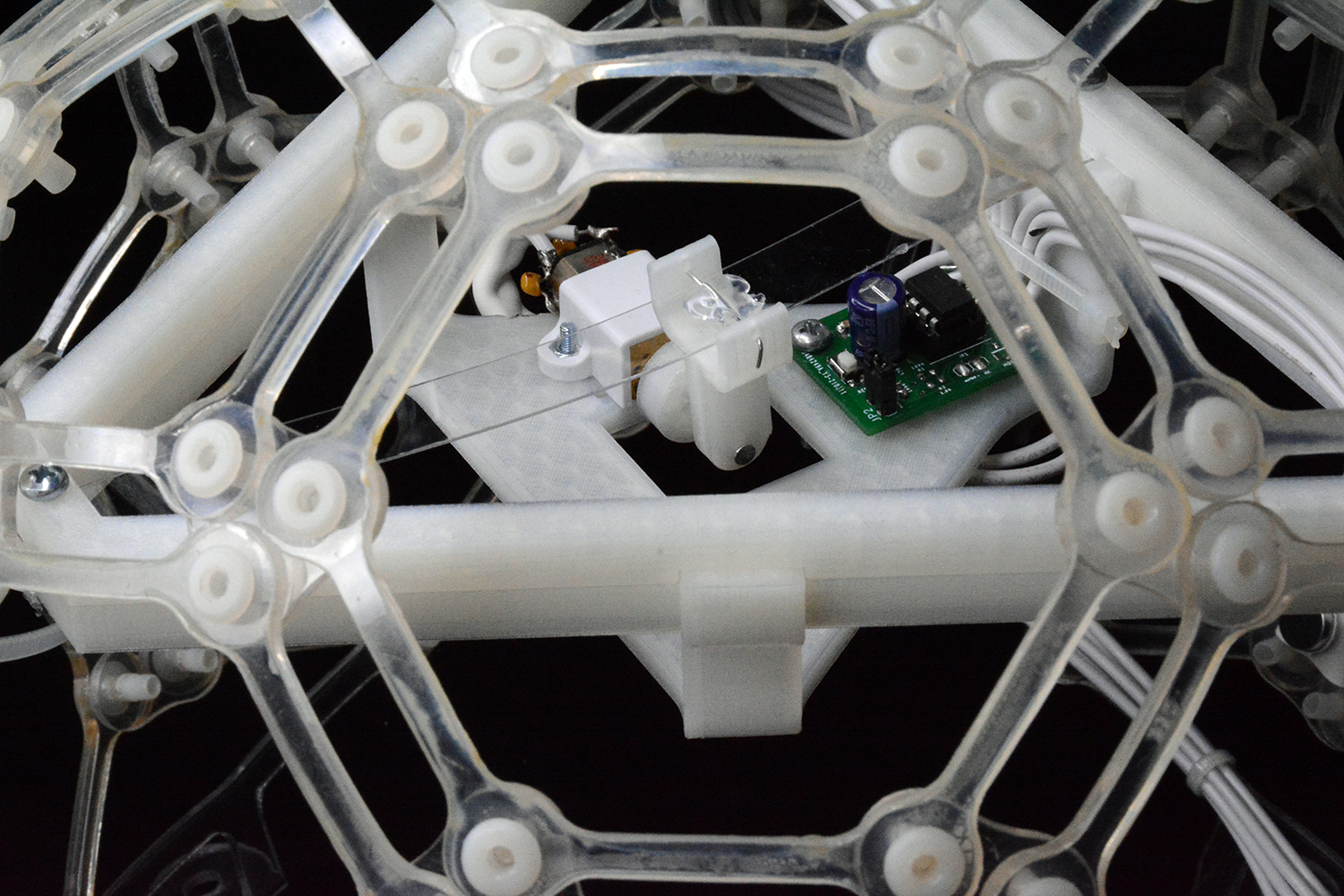
Image caption: Prototype of device. The motor driver circuit is on the left, and the ATTiny is in the centre. The potentiometer on the right is fed into the Arduino, which generates a PWM signal to simulate control from the sculpture.
February 8, 2021
The first Cicada prototype was finished last week. After some tinkering, we were able to get the solenoids to actuate the rib in both directions. We tested multiple frequencies and resonating chambers, and took a number of videos to catalogue the sound we got out of each one.
Our first resonating chamber was a cookie tin, which was very loud but also quite tinny and unpleasant.

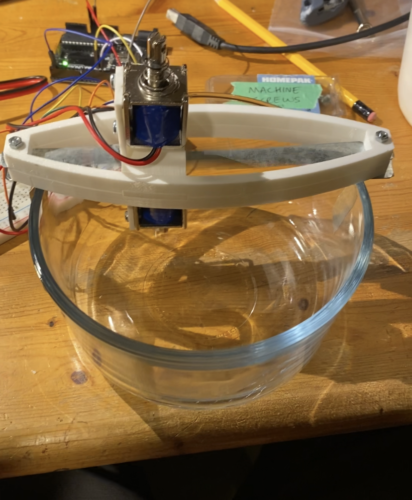


Image credit: Gordon Winch, 2020
We also tried a plastic bowl, a glass bowl, and a ceramic pot. In our opinion, the plastic was the best option as it muted the tinnier frequencies and is lightweight.
Finally, we tried the device by itself, with no resonating chamber. It is much quieter in this configuration.
With the solenoids and rib now working, we’ve identified a number of avenues for improvement.
Firstly, even without the tin resonating chamber, the sound produced is quite metallic and mechanical. We believe that this is a result of the metal-on-metal impact of the solenoid on the metal rib. In the short term, we’re going to try applying a drop of hot glue to the tip of the solenoid to dampen the impact. We’ll also try replacing the metal rib with acrylic, and possibly wood veneer. However, it seems that the solenoids themselves make a clicking sound when they actuate, so we’re thinking of ways to dampen that as well.
Secondly, we may be able to replace the dual solenoids with a single solenoid powered by an H-bridge circuit, such as this one. The end of the solenoid would be attached to a C-shaped part that could push or pull the rib. This would lower the cost, weight, and size of our device. We’re ordering more MOSFETs and diodes in order to test this circuit out.
Lastly, we’d like to try shrinking the device. As you can see from the videos, it fits comfortably in two hands, but it’s possible that we can make it even smaller, especially if there’s only one solenoid.
Project Leads
- Gordon Winch
- Jean Quirino
- Farhan Monower
- Jack Macdonald





Supported by the University of Waterloo.