Robotic Speculations Workshop: TU Delft Interactive Environments Minor 2023
Delft University of Technology
Delft, NL 2023
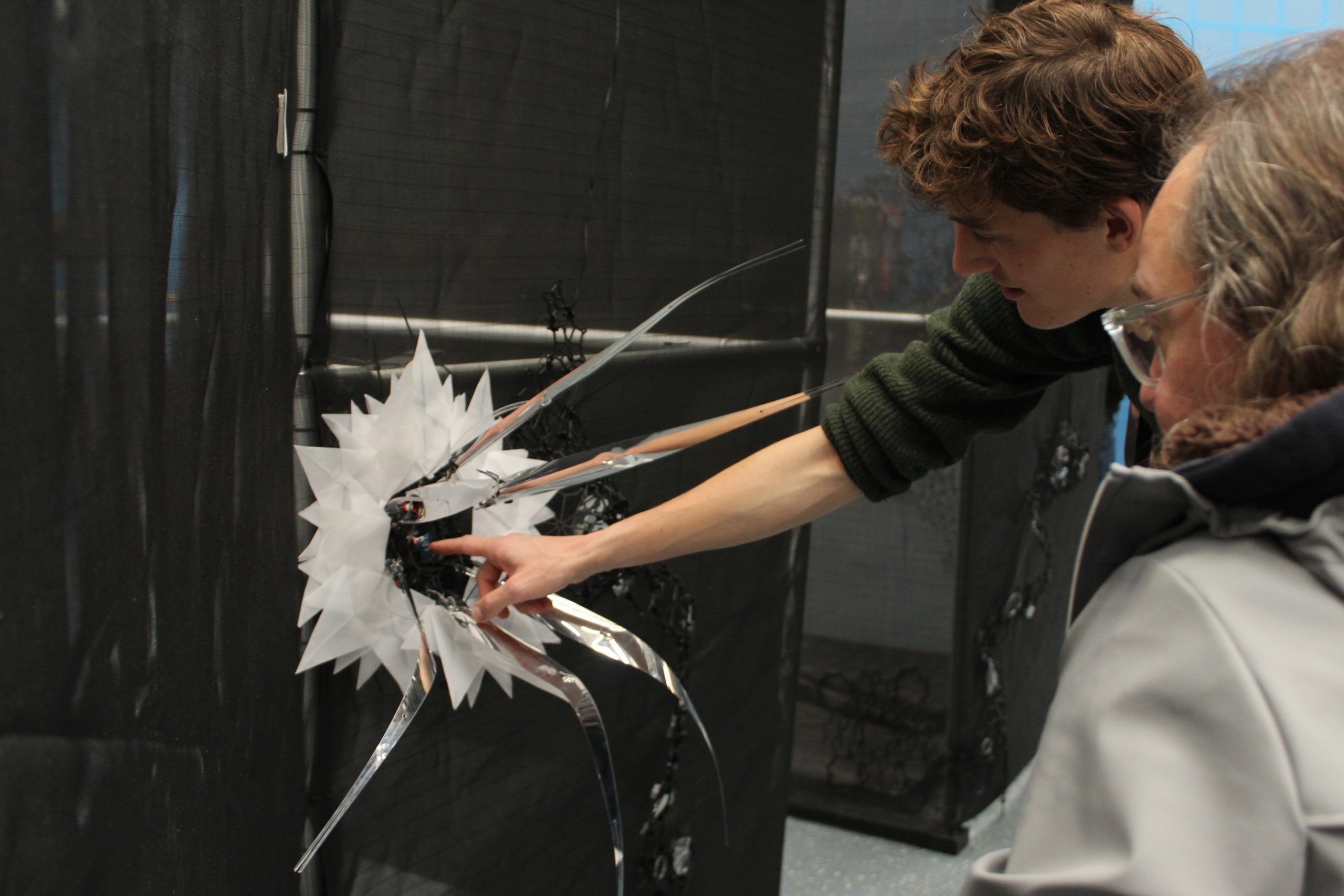
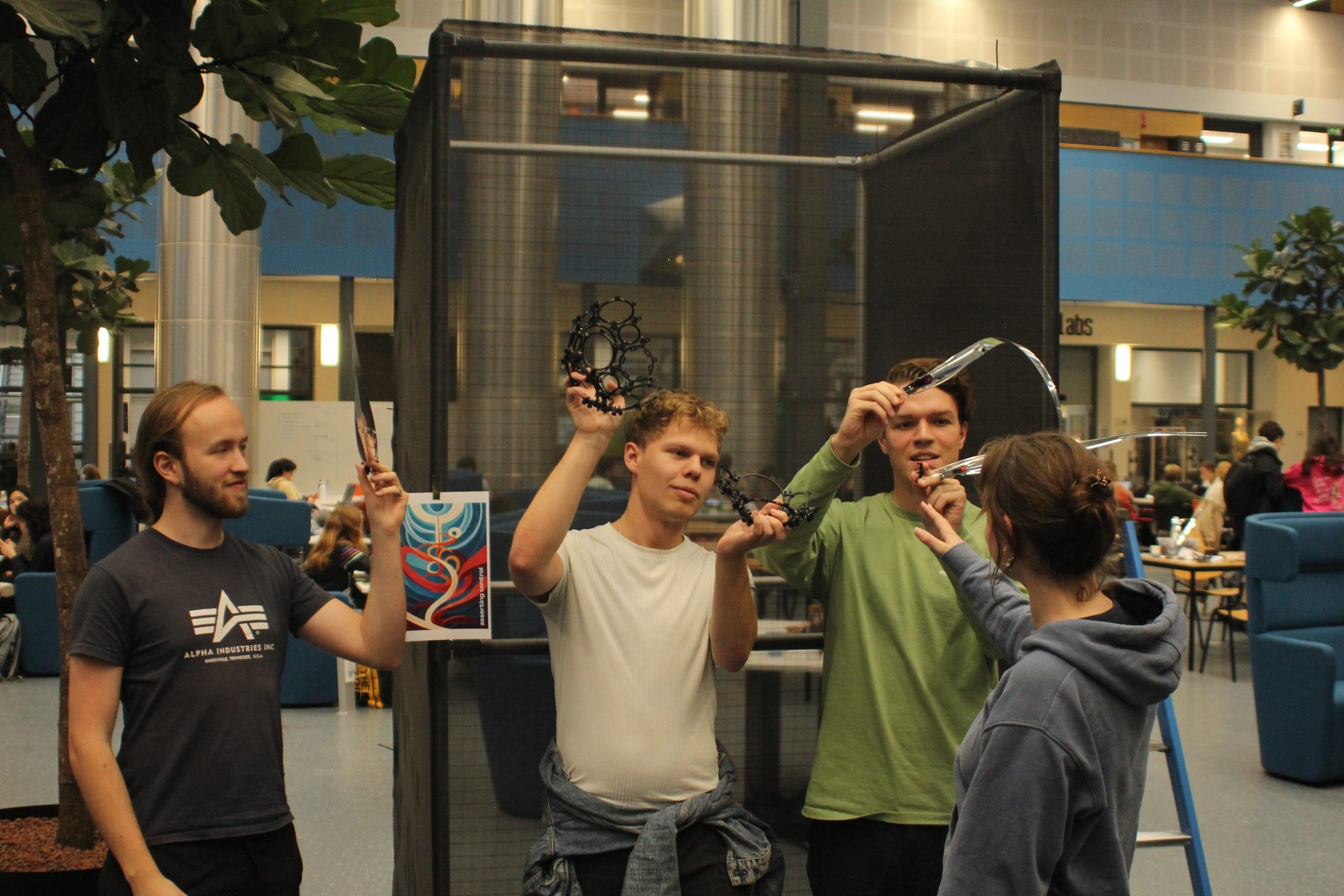
Robotic Speculations was a workshop presented by the Living Architecture Systems Group (LASG) in collaboration with Science Centre Delft and the Interactive Environments Minor of TU Delft, Oct. 30 – Nov. 4, 2023. Multiple components for fabrication, software and behaviour control systems developed by members of the Living Architecture Systems Group were tested and developed during intensive sessions involving multidisciplinary teams of students and interactive-systems researchers.
The workshop was conceived to ask the question of how can we use interactive environment to spark lateral thinking in transdisciplinary design, bringing stakeholders from Netherlands-based facilities including the international airport of Schiphol in Amsterdam on a speculative journey to reimagine robotic possibilities. A student-built immersive interactive environment was based on a system of structures invented by Philip Beesley and the Living Architecture Systems Group, programmed with behaviours inspired by conversations about baggage handling at Schiphol. An initial design was used to spark discussion, from which students created new behaviours to redesign the ecosystem based on shared imaginaries. LASG workshop leaders Matt Gorbet and Adrian Chiu worked with a TU Delft team led by Aadjan van der Meer.
The web-based software and the physical kit components that were included are part of an evolving collection of tools and component designs that have been developed by the Living Architecture Systems Group under Creative Commons licensing. Large-scale interconnected arrays in both virtual and physical forms can be easily constructed by extending the system components that are provided in these kits.These patterns can be duplicated for personal non-commercial use, conditional on preserving credit for authorship and on preserving the original license within material that you copy or adapt.
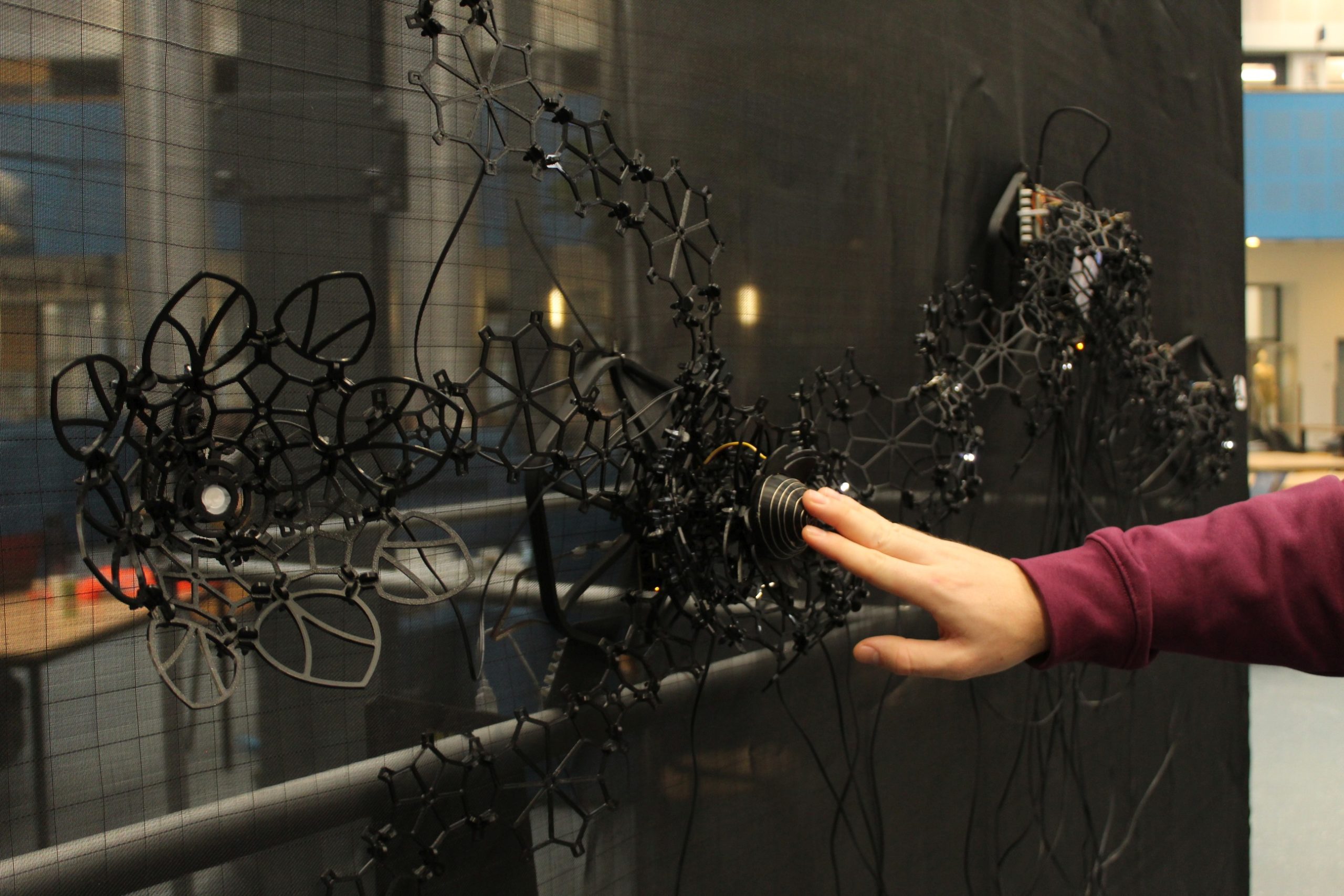
The component designs have been developed as part of a research and creation initiative that is seeking to develop architecture that approaches the qualities of living systems. Qualities within the kit scaffold designs support minimal material use and compliant structures that are capable of accommodating multiple components and evolving functions. The structures that are documented here include filamentary triangulated skeletal frameworks for highly efficient waffle, shell and spherical envelopes.
A manual accompanied the workshop describing the electronic components and software, describing recommended connections between “control” boards, motors, lights and sensors. By following the recommended connections, the electronic components can be flexibly arranged in a wide variety of different configurations. This flexible mounting system can support development of composite mechanisms, creating a diverse range of actuator and sensor components. This mount system includes cable-tie attachments that support precisely angled locations within the skeletal scaffold. A slotted tray design accommodates a range, of component mounts. Descriptions of software include the “profile” configurations used to customize how the physical electronics behave. This software will allow you to finely tune the output of individual mechanisms, how they respond to external stimuli, and how they propagate through a system. It will also allow you to then plan out physical configurations and simulate larger systems on a virtual canvas.
Project Leads
Philip Beesley
Timothy Boll
Adrian Chîu
Matt Gorbet
Aadjan van der Helm
LASG Executive
Rob Gorbet
Anne Paxton
LASG Design & Production
Kevan Cress
Janna Fahmy
Ryan Leung
Teodor Taras Mlynczyk
David Dyson Tam
TU Delft Interactive Environments Minor Staff
Aadjan van der Helm (Project Lead)
Chris Kievid
Martin Havranek
Justin Oosterbaan
TU Delft FRAIM Research and Innovation Team
Liliane Filthaut
Alessandro Ianniello
Maria Luce Lupetti
Dave Murray-Rust
TU Delft Interactive Environments Minor Students
Ina Sun Bøe
Maxine Jo Claar
Olivija Dijoka
Jan Eikevold
Adriaan Elzas
María Espina García
Merel Franke
Birte Hartmann
Claudia Daudén Llodrá
Justin Jo
Luc Koster
Eva Mattijsen
Mats Meerveld
Beatriz Monteiro
Nienke Mullink
Kate Nam
Esther Park
…
Iris Petre
Rubin Philippart
Robin Rietdijk
Radhika Sehgal
Álvaro Sempere Caro
Maarten Strebe
David van Beelen
Marijn van Geest
Dauphine van Halewijn
Diego Viero
Michael Werst
Carlijn Willems
Lachie Wilson
Izzy Zalat
David Zaragozá Sabater
Dingyue Zhang
Ruoqian Zhao
Don Zwartveld